特集自動運転とは/車と人をつなぐ「HMI」
コンピューターやインターネットの高速化を背景に、世界各国で研究が進む自動運転。現在の産業構造が一変するほどのインパクトを秘めている。
自動運転は5段階
現在の市販車はレベル2
一口に自動運転と言っても技術内容によってレベルがある。その詳細は国際的な標準となるSAE(米国自動車技術会)によって分けられている。現在市販されている自動運転車は、レベル1に近いレベル2だと言われており、国内メーカーでは、日産自動車の「プロパイロット1.0」、スバルの「アイサイト?ツーリングアシスト」などがそれにあたる。ドイツのダイムラー(ベンツ)やアウディにも同様の機能を備えたシステムが搭載されている。
| レベル | 概要 | 安全運転に係る 監視、対応主体 |
|
|---|---|---|---|
| 運転者が全てあるいは 一部の運転タスクを実施 |
SAEレベル0 自動運転化なし |
運転者が全ての運転タスクを実施 | 運転者 |
| SAEレベル1 運転支援 |
システムが前後?左右のいずれかの車両制御に係る運転タスクのサブタスクを実施 | 運転者 | |
| SAEレベル2 部分運転自動化 |
システムが前後?左右の両方の車両制御に係る運転タスクのサブタスクを実施 | 運転者 | |
| 自動運転システムが 全ての運転タスクを実施 |
SAEレベル3 条件付運転自動化 |
システムが全ての運転タスクを実施(限定領域内※) 動作継続が困難な場合の運転者は、システムの介入要求等に対して、適切に応答することが期待される |
システム (動作継続が困難な場合は運転者) |
| SAEレベル4 高度運転自動化 |
システムが全ての運転タスクを実施(限定領域内※) 動作継続が困難な場合、利用者が応答することは期待されない |
システム | |
| SAEレベル5 完全運転自動化 |
システムが全ての運転タスクを実施(限定領域内※ではない) 動作継続が困難な場合、利用者が応答することは期待されない |
システム |
※ここでの「領域」は、必ずしも地理的な領域に限らず、環境、交通状況、速度、時間的な条件などを含む。
自動運転車の実現にはあらゆるテクノロジーが不可欠

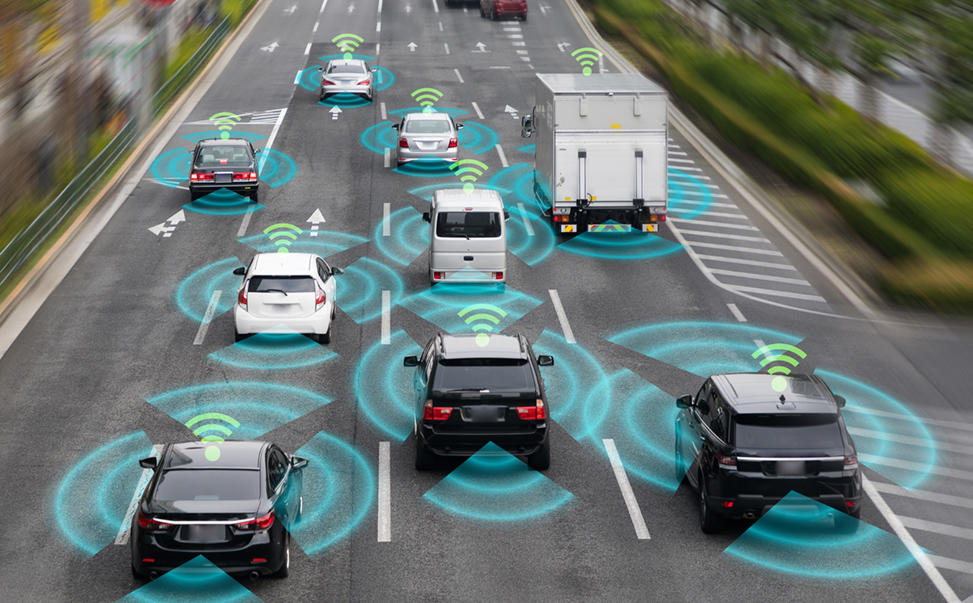
完全自動運転を実現するためには、大きく分けて三つの働きが必要となる。まずはじめに、カメラや各種センサーで集めたデータをもとに車両周辺の道路状況や運転者の状態を「認識」。次に、認識した内容と3Dマップデータ、周辺データなどをもとに走行軌道を「計画」する。最後に、計画どおりに走行できるよう、また、危険を察知した際に回避ができるよう、自動車を「制御」しながら走行しなければならない。これらの働きをスムーズに行うためには高度なAI(人工知能)と素早いデータ処理が必要だが、カメラやセンサーから集まった大量の情報と、クラウドに蓄積されているマップデータやアルゴリズムをやり取りしながら瞬時に判断するためには、現在のモバイル通信よりもさらに高速で安定したインターネット回線が必要だ。
次世代自動車は、現在の産業構造を大きく変える
「電気自動車(EV)」「自動運転車」に代表される次世代自動車の登場により、現在の産業構造は大きく変化すると言われている。
たとえば今後、電気自動車が主流となればこれまで燃料として使われてきた石油やガスの需要が落ち込み、太陽光発電などのクリーンエネルギーがそれに置き換わる可能性が高い。電気自動車といえばアメリカのテスラが有名だが、中国の新興メーカーやドイツの老舗メーカーも研究を加速させており、実は現在、電気自動車の保有台数は世界全体の30%以上を中国が占めている。電気自動車は電子機器を多く使用する自動運転との相性がいいうえ、エンジンを必要としないため参入障壁が低いとあって、将来は電気自動車がスタンダードになるとの意見も強い。加えて、自動運転車にはAI(人工知能)をはじめさまざまなソフトウエアが必要となるため、これまで自動車産業とは関わりの薄かったIT系企業の参入もめざましい。早い段階から自動運転の研究に取り組んでいたGoogleは、自動運転車の自社開発は中止したものの、研究部門を分社化して運転プログラムの開発を続けている。
車両に直接関わる業界のみならず、次世代自動車の登場によって現在の交通システムが大きく変わるとの予想もあり、次世代自動車のインパクトはあらゆる産業に及んでいる。
各国のBEV(バッテリー式電動輸送機器)保有台数 (単位:千台)
| 2011 | 2012 | 2013 | 2014 | 2015 | 2016 | |
|---|---|---|---|---|---|---|
| 中国 | 632 | 1,596 | 3,057 | 7,948 | 22,619 | 48,319 |
| フランス | 293 | 860 | 1,738 | 2,794 | 4,521 | 6,697 |
| ドイツ | 165 | 386 | 918 | 1,752 | 2,960 | 4,092 |
| 日本 | 1,613 | 2,960 | 4,435 | 6,046 | 7,093 | 8,639 |
| アメリカ | 1,352 | 2,817 | 7,586 | 13,928 | 21,033 | 29,706 |
出典:IEA analysis based on EVI country submissions
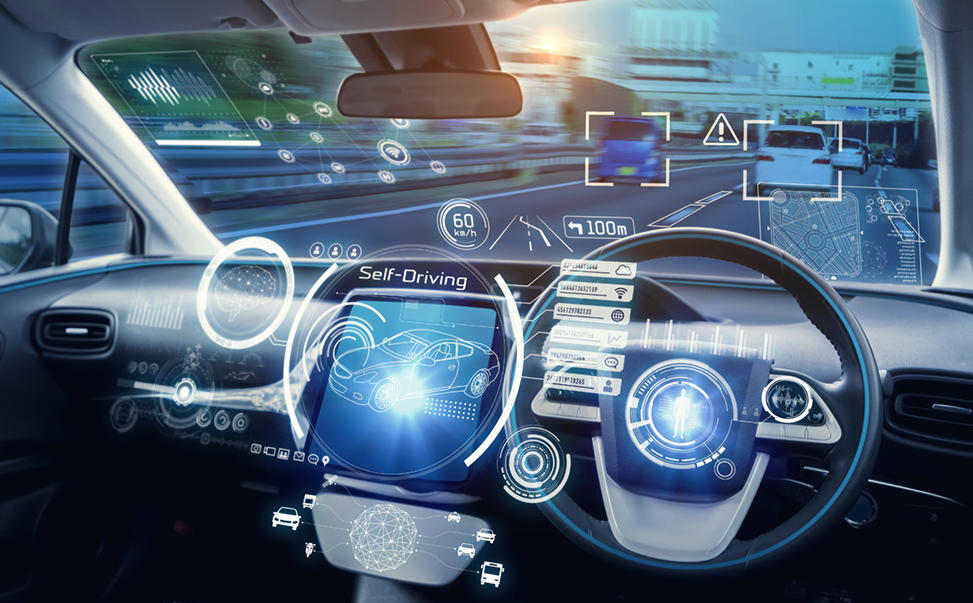
車と人をつなぐ「HMI 」
「ヒューマンマシンインターフェース(HMI)」とは、人間と機械(システム)が相互にやりとりできる仕組みのこと。自動運転車を"快適に"乗りこなすためには欠かせない機能だ。
理工学部 交通機械工学科
相馬 仁 教授
Hitoshi Soma
東京都立大学大学院理工学研究科機械工学専攻修士課程修了。日本自動車研究所にて車両運動?予防安全部門、人間?機械系部門、ITS(高度道路交通システム)部門などを経て、新潟大学工学部助教授などを歴任。2009年より現職。日本機械学会フェロー、自動車技術会本部理事、自動車技術会中部支部理事、日本人間工学会東海支部理事、日本交通医学工学研究会理事。
自動運転システムを人が「無理なく」監視制御&対処できる仕組みを

※写真はイメージです。
実際のところ、レベル5と言われる「完全運転自動化」が実現するのはまだ先の未来になると思っています。レベル4まではドライバーによる監視制御が必要です。つまり、自動運転とは言ってもメーターやランプを常にチェックしていないといけないわけです。そうした場合、まず1点目に「そもそも人は自動運転のシステムを監視制御できるのか」、2点目に「監視制御ができたとしても異常を感知した時すぐに動けるのか」といった課題が挙げられます。
本研究室では、まずは「人がシステムの監視制御を行うことは簡単ではない」ことを解明し、次に「どういったシーンでどんな危険?問題が起きるのか」「監視制御や異常への対処を行うためにはどのようなヒューマンマシンインターフェースが有効なのか」といった研究につなげています。
加えて、今後の取り組みとしては、パーソナルモビリティービークル(PMV)の自動運転化に向けた研究を予定しています。PMVとは、1人または2人乗りの「超小型四輪車」。運転免許は必要ですが、従来の自動車に比べて操作が簡単なうえ駐車スペースが少なくて済むというメリットがあり、次世代のモビリティーとして注目を集めています。PMVの自動運転化は、郊外の高齢者など、交通弱者の手助けになるのではと期待しています。
研究風景
-

-
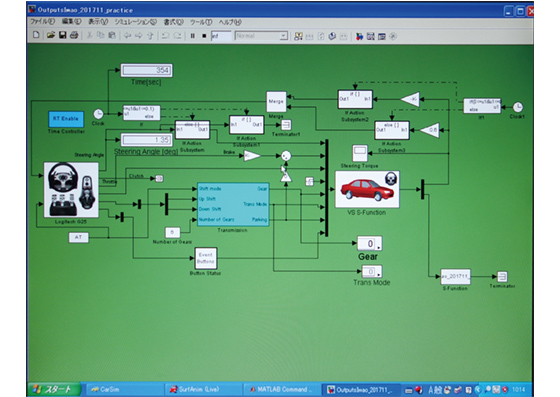
プログラムによって、さまざまな状況をつくり、ドライビングシミュレーターで検証を重ねる。
-
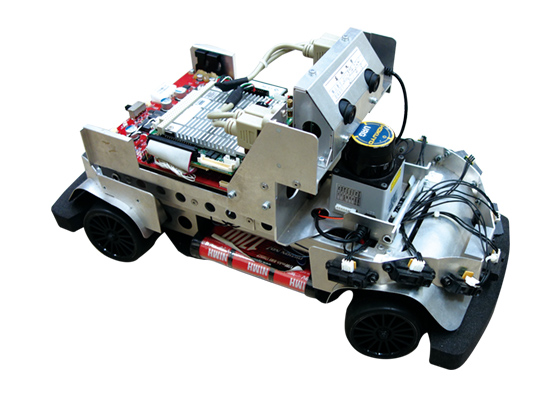
ステレオカメラやレーダーを積んだ自動運転ロボットカー。自動駐車に成功し、自動走行も視野に入れている。
「人は自動運転システムを監視制御できるのか」に関する検証や、システム異常の際の対処能力などをドライビングシミュレーターで測定。収集したデータをもとに、タブレット端末やスマートグラスといった市販のウエアラブル機器を使い、ハードウエアとソフトウエアの両方から、ヒューマンマシンインターフェースの開発を進めている。
そのほか、自動車の電動化を生かした危険回避システムの開発にも取り組んでいる。 従来の車はハンドルとタイヤが機械的に連動しているが、電動化された車の場合、ハンドルとタイヤを電気系統でつなげられるので、各種センサーと連動しながらさまざまな制御を行うことが可能。例えば、横風が強い状況下ではハンドルを動かさなくてもタイヤが動いてコースを維持。前方に障害物を感知した場合は、急ブレーキとともに、障害物を避けるためにハンドルを切った角度よりも大きくタイヤが動く、など。このように、制御量だけでなく、その変化割合も利用して操作量を制御する方法を「微分制御」と言う。